Scene understanding is a pivotal task for autonomous vehicles to safely navigate in the environment.
Recent advances in deep learning enable accurate semantic reconstruction of the surroundings from LiDAR
data. However, these models encounter a large domain gap while deploying them on vehicles equipped with
different LiDAR setups which drastically decreases their performance. Fine-tuning the model for every
new setup is infeasible due to the expensive and cumbersome process of recording and manually labeling
new data. Unsupervised Domain Adaptation (UDA) techniques are thus essential to fill this domain gap
and retain the performance of models on new sensor setups without the need for additional data labeling.
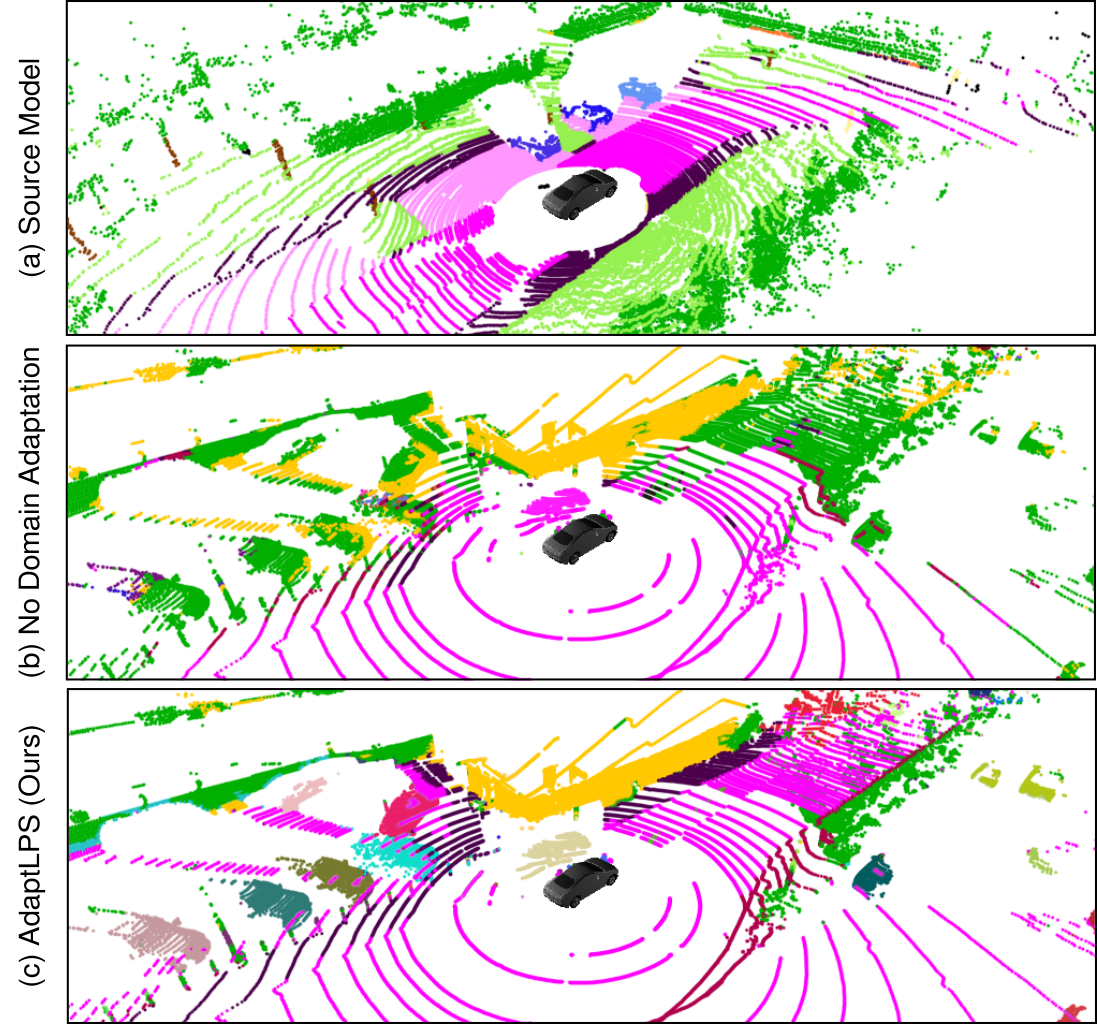
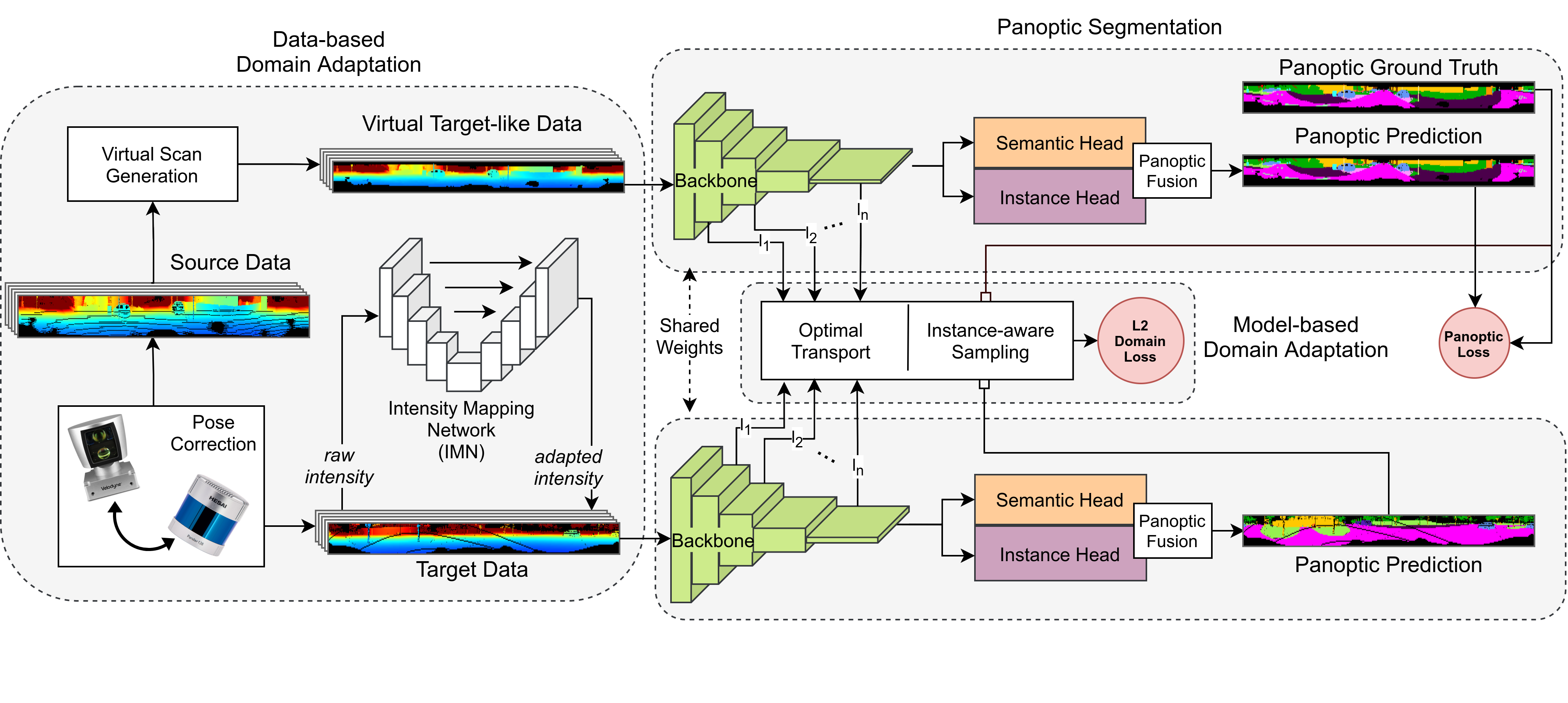
In this paper, we propose AdaptLPS, a novel UDA approach for LiDAR panoptic segmentation that leverages
task-specific knowledge and accounts for variation in the number of scan lines, mounting position,
intensity distribution, and environmental conditions.
We tackle the UDA task by employing two complementary
domain adaptation strategies, data-based and model-based. While data-based adaptations reduce the domain
gap by processing the raw LiDAR scans to resemble the scans in the target domain, model-based techniques
guide the network in extracting features that are representative for both domains. Extensive evaluations
on three pairs of real-world autonomous driving datasets demonstrate that AdaptLPS outperforms existing
UDA approaches by up to 6.41 pp in terms of the PQ score.